انواع الکتروموتور (Electro-Motor)

انواع الکتروموتور (Electro-Motor)
دستگاهی که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند را الکتروموتور گویند. همانطور که مشاهده می کنید الکتروموتور ها به دو صورت خطی linear” ” و دوار rotary”” هستند. اغلب موتورهای الکتریکی دوار هستند. در یک موتور دوار بخش متحرک که معمولاً داخل موتور می باشد و که به بخش دوار روتور و بخش ثابت که استاتور گفته میشود. موتورهای الکتریکی شامل آهنرباهای الکتریکی هستند که بر روی یک قاب که اغلب به اشتباه آرمیچر گفته می شود سیم پیچی شده اند. در حقیقت آرمیچر آن بخش از موتور می باشد که به آن ولتاژ ورودی اعمال می گردد یا آن بخش از ژنراتور می باشد که در آن ولتاژ خروجی ایجاد بوجود می آید. با توجه به طراحی موتور ، هر کدام از بخشهای روتور یا استاتور میتوانند به عنوان آرمیچر باشد.
شرکت آرین نور پارس انرژی در راستای مشاوره و فروش انواع محصولات برق صنعتی، ژنراتور، الکتروموتور و پمپ خدمات رسانی میکند.
توضیحات محصول
الکتروموتور چیست؟
دستگاهی که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند را الکتروموتور گویند. همانطور که مشاهده می کنید الکتروموتور ها به دو صورت خطی “linear” و دوار “rotary” هستند. اغلب موتورهای الکتریکی دوار هستند. در یک موتور دوار بخش متحرک که معمولاً داخل موتور می باشد و که به بخش دوار روتور و بخش ثابت که استاتور گفته میشود. موتورهای الکتریکی شامل آهنرباهای الکتریکی هستند که بر روی یک قاب که اغلب به اشتباه آرمیچر گفته می شود سیم پیچی شده اند. در حقیقت آرمیچر آن بخش از موتور می باشد که به آن ولتاژ ورودی اعمال می گردد یا آن بخش از ژنراتور می باشد که در آن ولتاژ خروجی ایجاد بوجود می آید. با توجه به طراحی موتور ، هر کدام از بخشهای روتور یا استاتور میتوانند به عنوان آرمیچر باشد.

تفاوت الکتروموتور و ژنراتور در چیست؟
دستگاهی که حرکت مکانیکی را به انرژی الکتریسیته تبدیل می کند را ژنراتور گویند و تفاوت ژنراتور و الکتروموتور فقط در عملکرد شان می باشد.
کاربرد الکتروموتور و انواع آن:
⦁ الکتروموتور جریان متناوب یا AC
⦁ الکتروموتور جریان مستقیم یا DC

کاربرد موتور الکتریکی DC و انواع آن چیست؟
موتورالکتریکی DC دارای آرمیچری از آهنربای الکتریکی می باشد. یک سوییچ گردشی به نام کموتاتور دارد که جهت جریان الکتریکی را در هر سیکل دو بار برعکس می نماید تا در آرمیچر جریان عبور کند و آهنرباهای الکتریکی، آهنربای دائمی را در بیرون موتور جذب و دفع کنند. سرعت موتور هایDC به ولتاژ و جریان عبوری از سیم پیچهای موتور و گشتاور ترمزی ، وابسته است. در ادامه در مورد کاربرد الکتروموتور DC بیشتر بیان شده است.
معمولاً سرعت به وسیله ولتاژ متغیر یا عبور جریان و با استفاده از تپها که نوعی کلید تغییر دهنده وضعیت سیم پیچ هستند در سیم پیچی موتور یا با داشتن یک منبع ولتاژ متغیر ، کنترل می شوند. بدلیل اینکه این نوع از موتور میتواند در سرعتهای پایین گشتاوری زیاد ایجاد کند، معمولاً کاربرد ابن الکتروموتور جاهایی نظیر لکوموتیوها است.
موتورهای میدان سیم پیچی شده:
آهنرباهای دائم (در استاتور) بیرونی یک موتور DC را می توانیم با آهنرباهای الکتریکی تعویض کنیم. با تغییر جریان میدان سیم پیچی روی آهنربای الکتریکی توانایی آن را داریم تا نسبت سرعت به گشتاور موتور را دچار تغییر کنیم. اگر سیم پیچی میدان به صورت سری با سیم پیچی آرمیچررا قرار دهیم، یک موتور گشتاور بالای کم سرعت خواهیم داشت و اگر به صورت موازی قرار دهیم، یک موتور سرعت بالا با گشتاور کم نیز خواهیم داشت. برای بدست آوردن سرعت زیادتر به همراه گشتاور کمتری که با سرعت متناسب است ، باید جریان میدان را کمتر کنیم. این روش برای ترکشن الکتریکی و خیلی از کاربردهای مشابه آن ایدهآل می باشد و کاربرد این روش منجر به حذف تجهیزات یک جعبه دنده متغیر مکانیکی می گردد. کاربرد الکتروموتور بسیار گسترده است که در ادامه به آن اشاره می شود.
کاربرد موتور یونیورسال
یک نمونه از انواع موتورهای DC میدان سیم پیچی شده موتور یونیورسال می باشد. نام این گونه از موتورها بر این اساس است که این موتورها را میتوان هم با جریان DC و هم AC بکار برد، اگر چه که اغلب این موتورها با تغذیه AC کارمی نمایند. اصول کار این موتورها بر این اساس می باشد که وقتی یک موتور DC میدان سیم پیچی شده به جریان متناوب وصل میشود، جریان هم در سیم پیچی میدان و هم در سیم پیچی همزمان تغییر می کند و بنابراین نیروی مکانیکی بوجود آمده همواره بدون تغییر می باشد. در عمل موتور بایستی به صورتی طراحی گردد تا با جریان AC سازگاری داشته باشد و موتور نهایی معمولا دارای کارایی کمتری نسبت به یک موتور معادل DC خالص خواهد بود.
کاربرد موتورهایAC
موتور AC مانند بیشتر موتورهای الکتریکی دارای استاتور و روتور هستند که با فاصله ای دقیق ازهم قرارداده شده اند . چرخش موتورهای AC روتور داخل یک میدان مغناطیسی دوار قرار می گیرد درحالیکه در موتورهای DC و همچنین موتورهای AC تک فاز این میدان دوار باید به وسیله یک دستگاه الکتریکی یا مکانیکی بوجود آیند.
موتورهای ACتکفاز
رایج ترین موتور تک فاز موتورتک فاز سنکرون قطب چاکدار می باشد، که عموما در دستگاه هایی بکار می رود که گشتاور پایین احتیاج دارند، نظیر لوازم خانگی کوچک که در آهن موتور وجود دارد. نوع دیگر موتورهای AC تک فاز موتور القایی می باشد، که عموما در لوازم بزرگ نظیر ماشین لباسشویی و … مورد استفاده واقع می شوند. معمولا این موتورها گشتاور راه اندازی زیادتری را با استفاده از یک سیم پیچ راه انداز به همراه یک خازن راه انداز و یک کلید گریز از مرکز ایجاد می کنند.
در زمان راه اندازی ، خازن و سیم پیچ راه اندازی از طریق یک دسته از کنتاکت های تحت فشار فنر بر روی کلید گریز از مرکز دوار ، به منبع برق متصل می گردد. خازن به افزایش گشتاور راه اندازی موتور کمک می نماید. زمانی که موتور به سرعت نامی خود دست پیدا کند، کلید گریز از مرکز فعال می گردد و دسته ی کنتاکت ها فعال می گردد، خازن و سیم پیچ راه انداز که به صورت سری شده را از منبع برق جدا می کند، در این هنگام موتور تنها با سیم پیچ اصلی کار می نماید. کاربرد الکتروموتور تکفاز بسیار گسترده است و در صنایع کوچک و خانگی به وفور از آن استفاده می شود. کاربرد موتور تکفاز تک خازن بیشتر در تجهیزاتی است که برای راه اندازی گشتاور بالایی نیاز ندارند مانند پمپ و دمنده های سانتریفیوژ.
موتورهایACسه فاز
این نوع موتور ها برای کاربرد هایی که به توان بالاتری از موتورهای القایی سه فاز AC یا چند فاز استفاده می گردد. این گونه از موتورها از اختلاف فاز موجود بین فازهای تغذیه چند فازی الکتریکی برای ایجاد یک میدان الکترومغناطیسی دواردر درون شان ، استفاده می نمایند. عموما، روتور دارای تعدادی هادی مسی می باشد که در فولاد قرار داده شدهاند و از طریق القای الکترومغناطیسی میدان مغناطیسی دوار در این هادی ها القای جریان می نمایند، که در نتیجه منجر به ایجاد یک میدان مغناطیسی متعادل کننده می گردد که باعث میشود که موتور در جهت گردش میدان به حرکت درآید.
استفاده از این نوع موتور در کاربردهایی مانند لوکوموتیوها ، که آنها موتور آسنکرون نامیده می شوند، روز به روز در حال افزایش هستند. در موتور سنکرون است، موتور به طوری که در زمان با میدان مغناطیسی دوار ناشی از برق AC سه فاز ، به گردش در آید.از موتورهای سنکرون میتوانیم به عنوان مولد جریان استفاده کنیم.
سرعت موتورهای AC در ابتدا به فرکانس تغذیه وابسته است و تفاوت در سرعت چرخش بین روتور و میدان استاتور ، گشتاور بوجود آمده ی موتور را مشخص می نماید. تغییر سرعت در این نوع از موتورها را میتوان با دارا بودن دسته سیم پیچها یا قطب هایی در موتور که با شروع و متوقف کردن شان سرعت میدان دوار مغناطیسی باعث عوض شدن می شود.
الکتروموتور از چه بخش هایی تشکیل شده است؟
⦁ استاتور
⦁ روتور
⦁ براکت الکتروموتور
۱- استاتور چیست؟
بخش ثابت الکتروموتور، استاتور خوانده می شود که آن را بالشتک نیز می نامند. عموما استاتور از قطعات سبک ، باریک و کوچک آلومنیوم یا آهن ساخته می شود و وظیفه اصلی استاتور در الکتروموتور ها بوجود آوردن یک میدان مغناطیسی می باشد به همین دلیل است که استاتورها به صورت ورقه ای تولید می شوند تا باعث کاهش تلفات ناشی از جریان گردابی شوند اما جریان های گردابی موجب تولید گرما وکه در نتیجه باعث گرم شدن استاتور و هدر رفت انرژی می شوند.

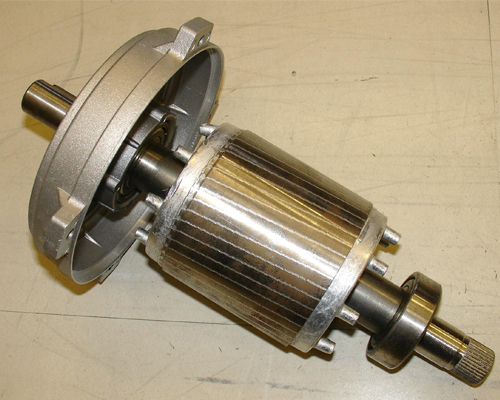
۲- روتور چیست و چه انواعی دارد؟
به بخش محترک الکتروموتور روتور می گویند. روتور از قطعاتی جدا از هم و باریک که عموما جنس فولاد هستند تشکیل شده است که در میان آن قطعات میله هایی از جنس مس و آلومنیوم قرار گرفته است ساخته شده اند. چرخش روتور بخاطر میدان مغناطیسی موجود بین روتور و استاتور است که در اطراف روتور موجب ایجاد گشتاور می شود که نتیجه ی آن چرخش روتور می شود.
روتور ها به دو دسته ی زیر تقسیم بندی می شوند:
⦁ روتور قفس سنجابی Squirrel Cage Rotor) )
⦁ روتور سیم پیچی یا روتور دور کلافی Slip Ring))
⦁ روتور با قطب برجستهAlternator) )
۱- روتور قفس سنجابی
روتور قفس سنجابی به صورت یک سیلندر نصب شده بر روی یک محور می باشد . درون آن شامل میله های رسانای طولی (عموما از جنس آلومینیوم و یا مس) می باشد که درون شیارهایی قرار دارند و از هر دو طرف به حلقه های کوتاه کننده متصل گردیده است وبه شکل یک قفس است و این نام از مشابهت بین این حلقهها و میله های سیم پیچ با قفس سنجاب گرفته است. هسته ی روتور با لایههایی از فولاد برقی ایجا می گردد. روتور نسبت به استاتور دارای شیار های کمتری می باشد و باید به این توجه داشت که تعداد شیارهای روتور مضربی از تعداد شیارهای استاتور نباشد زیرا به گونه ای باید به گونه ای باشد که از قفل شدن میدان مغناطیسی دندانههای روتور و استاتور در زمان استارت جلوگیری گردد.
تقریبا ۹۰ درصد در موتور های القایی از روتور قفس سنجابی استفاده می گردد و علت آن این است که این نوع روتور داری ساختار محکم تر و ساده تری می باشد. در روتورهای قفس سنجابی سرعت روتور با لغزش آن رابطه عکس دارد که با افزایش لغزش جریان روتور نیز افزایش پیدا می کند که نتیجه آن ایجاد گشتاور بالا تر می باشد.
۲- روتور سیم پیچی
این روتورها از یک هسته به صورت استوانه ای شکل ساخته می شود با یک ورقه لایه ای و شیارهای برای نگه داشتن سیم ها تشکیل می گردد. این نوع از روتورها جریان راه اندازی پایینی دارند و کنترل بالاتری بر گشتاور دارند و با سرعتی ثابت کار می کنند که با افزایش مقاومت خارجی به مدار در روتور گشتاور راه اندازی نیز زیاد خواهد شد. مزیت این نوع از روتور ها این است که می توان با قرار دادن بانکهای مقاومتی در سر راه این سیم پیچ ها، مقاوت روتور را کم ویا زیاد کرده و جریان کشی الکتروموتور را بسته به نیاز تغییر داد.

۳- روتور با قطب برجسته
این نوع از روتور ها حالت و شکل سیلندری ندارند و ناظر ساکن روی استاتور در زوایای مختلف چرخش روتور، رلوکتانس های مغناطیسی متفاوتی می بیند. کاربرد این نوع از روتور ها در ماشین هایی که سرعت آنها کم است مانند نیروگاههای آبی مورد استفاده قرار می گیر توجه داشته باشید در ماشین هایی با سرعت بالا مانند ژنراتورهای با توربین گازی به دلیل سرعت بالا و نیروی گریز از مرکز زیاد، استفاده از ماشین های با قطب صاف ارجح است.
براکت الکتروموتور
براکت بخشی از الکتروموتور می باشد. براکت الکتروموتور باتوجه به این که موتورآلومینیومی باشد یا چدنی جنس براکت موتور متفاوت می باشد. براکت الکتروموتور در حقیقت همان دری جلو یا عقب دینام می باشد که با حداقل سه پیچ یا بیشتر به الکتروموتور وصل می شود.
در مورد مصرف و کاربرد الکتروموتور مقالات دیگری در سایت کالا صنعتی درج شده است. میتوانید با مراجعه به مقالات الکتروموتور با کاربرد انواع الکتروموتور آشنا شوید.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.